智想做一个比较小的机械臂终采用了0齿隙谐波减速器的步进电机单次驱动效果是这样的
2021-10-09 23:16
作者:笑笑
来源:IT之家 阅读量:8870
别人的国庆,硬生生造出了一个钢铁侠的机械臂!
还是来自华为的天才少年智,还是他迄今为止参与过的最复杂的项目。
来,秀——,缝葡萄:
葡萄包扎后,原来是裂成一个小口,变成了这样:
画一把:的钥匙。
以上所有流程都可以在卫生间远程实时完成!
它的名字也很有趣——叫做假人
毕竟头上戴着哔哩哔哩野铁人光环的智惠均说,这是他最复杂的项目,硬核程度绝对不仅限于此。
事实是,——机械臂,里里外外,都是智制造的!
结果很自然,弹幕又被网友刷疯了,去感受这种感觉:
甚至内部人士给出了惊人的:
真正的机械臂应该是什么样子。
智想打造的机械臂有多种交互模式。
比如用力反馈抓手代替刚才机械臂的末端,就会变成可以在几秒钟内夹住薯片的机械臂:
除了力反馈抓手,如果换成不同的效应器,可达到的效果也会不同。
安装激光即可实现立体雕刻。
如果你安装一个刷子,你可以画画和书法。
安装一个可以用作6轴雕刻机的小主轴。
以上所有节目都是——同步真人!
除此之外,智还做出了许多不同的互动方式。
比如结合前沿技术,增强现实——真的指哪里玩。
还有一种方法是通过教学设备打开它。
这个教学装置也是智制造的。用他的话说,就是:
哪里有我,哪里就有屏幕。
这是智设计的无线智能终端,也是这个机械臂的伴侣。
它可以通过低功耗的蓝牙与机械臂连接,连接后可以实时显示机械臂的各种状态信息,切换各种功能。
当然,智也做了一个比较死的图形化方式。
极客的两种方法,都是通过串口和命令行,还有一些。
这个狂野的钢铁侠机器人手臂是如何炼成的。
如何打造钢铁侠的机械臂。
这只看起来很酷的手是一个小而高精度的6轴机械臂。
总体来说,机械臂的构建主要分为4个部分:机械臂设计,闭环伺服,控制器和空间定位装置,分别对应机器人的躯干,心脏,小脑和眼睛。
机械臂设计是指机械臂的躯干,是使机械臂稳定运动的必要步骤,包括机械分析,外观设计,材料选择等。
当然,这里的设计没那么容易仅版本就有:的150多个版本
为了保证稳定性,廉价性和美观性,最终机械臂本体采用铝制CNC加工,装饰采用3D打印。
其中CNC部分是UP西克大师智做的,他要求家里有工厂拆机帮你西克。这八块金属一共花了半个月:
最后被设计成酱姨,且不说还挺好看的。
闭环伺服,即机械手的心脏,用来为机械手工作提供动力。
具体来说,软件包括FOC算法,绝对值编码器放大器,PID算法,CAN总线通信协议等部分,硬件方面,除了电机等材料的选择,还包括散热等细节。
一般来说,机械臂会使用无刷伺服电机,但这里真的很笨重。
由于智想做一个比较小的机械臂,最终采用了0齿隙谐波减速器的步进电机,单次驱动效果是这样的:
由于是6轴机器人,整体采用了6个步进电机和6个谐波减速器,通过软件设计构成了机械臂的心脏。
控制器是指机械臂的小脑,用于控制机械臂的运动,实现各种功能。
除了原则上的运动学和动力学分析,还需要在硬件和软件上掌握额外的斜线技能,如电路设计,通信和电源管理。
事实上,这个机械臂上有多达12个微控制单元。
其中,主控制器和电机伺服驱动器(支持CAN总线amp动力单元设计如下:
至于电路设计,比预想的要复杂毕竟要实现上述多控功能,除了命令行控制,还需要考虑蓝牙和无线通信的相关软硬件
是的,除了有线控制,蓝牙,WiFi,2.4G也可以控制这个机械臂~
最后是空间定位装置,即机械臂的眼睛,用于机械臂看和操作待完成的任务。
这包括我们常用的双目视觉算法,AHRS系统和力传感系统,所有这些都是在这一步完成的。
没错,智设计的机械臂不仅仅是输入任务并完成的简单操作,更是一个真正能多角度接收任务并实时处理的智能机械手。
简单来说就是用双目视觉算法识别,然后用AI算法实现手势估计等操作:
安装在机械臂上后,手可以根据人体动作完成一系列复杂的操作:
当然,经过软件去抖,运动范围重映射,扭矩增强等操作后,机械臂就可以完成了。
比手精度更高的操作。
最后,就是将这几部分的软件算法和硬件组装起来,进行调试:
最后的成品效果是这样的,非常灵动:
那么,这台机械臂究竟能达到一个什么水平呢。
成本控制在 1 万以内
众所周知,机械臂的价格会伴随着精度的提升蹭蹭上涨。
一台质量比较好的,精度为 0.6mm 的工业 6 轴机械臂,价格会达到几万元左右,而精度在 0.02mm 左右的四大家族的工业机械臂,价格单位则直接涨到了几万美元。
从稚晖君测试结果来看,精度为 0.01mm 的百分表,进行末端重复精度测量,精度直接达到了 0.02mm 左右:
这样的精度,按理说机器人的价格也不菲。
可是,据稚晖君表示,Dummy 的整体硬件成本,计算下来不到 1 万元!
当然,稚晖君也适当地节省了成本,包括谐波减速器和机械臂本体,就都是二手的。
除此之外,据稚晖君表示,这台机械臂本身体积也很小,所以运动范围和精度也相应变小和变高了。
这样的机械臂,究竟可以用在哪里呢。
大胆想象一下,未来如果继续提升精度,远程手术也未尝不可:
还有网友更具体地设想了一下使用场景:
即使在偏远的地方,各地大医院的医生也能通过远程手术,同步实现救人,或是利用智能程序设定,实现简单的缝皮等操作,为医生节省更多时间。
对于项目本身,有网友调侃开源一下脑子:
也有一些科技区 UP 的梦幻联动:
当然,我们也知道,稚晖君已经于去年年底加入了华为天才少年。
而这次稚晖君的项目,操作系统和 AI 计算平台也分别都用上了华为鸿蒙和昇腾 Atlas 处理器。
就在 8 月 2 日,任正非还在题为「江山代有才人出」的演讲中表扬了稚晖君的项目,指出这是华为创新的动力:
但对于 2012 实验室,公司从未给过你们过多约束比如,有人研究自行车的自动驾驶,公司没有约束过他
我们要生产自行车吗没有啊这是他掌握的一把手术刀,或许以后会发挥什么作用,产生什么巨大的商业价值
接下来,稚晖君计划将项目进行整理后开源,目前已经在 GitHub 上放了一个坑。
对自制机械臂感兴趣的小伙伴,可以不定期去蹲一蹲了~
One More Thing
此次制作的项目,其实也是稚晖君给自己的一份生日礼物。
在此祝上真挚的生日祝福~
项目地址:
稚晖君机械臂视频:
参考链接:
声明:本网转发此文章,旨在为读者提供更多信息资讯,所涉内容不构成投资、消费建议。文章事实如有疑问,请与有关方核实,文章观点非本网观点,仅供读者参考。
猜您喜欢
最新热点
a股市场股份回购总额接近1400亿元
2021-10-09 23:16
为了在洪水和疫情过后推出旅游市场
2021-10-09 23:12
球迷王先生专程从日照赶到青岛参加青岛啤酒观战晚会
2021-10-09 23:05
公司是否有计划在投资者互动平台上拓展钢铁以外的业务
2021-10-09 23:03
估值没有大幅下降的情况下今年a股有望继续走强上证指数年线有望连续三年上涨
2021-10-09 22:51
国际油价上涨的预期依然存在呈现正向波动
2021-10-09 22:38
精彩推荐

经济新动能加速聚集A股中长期向上趋势不改
2021-07-29 09:44

首趟“中吉哈”公铁联运中转出境
2021-07-29 09:15

音乐是我永远的好朋友——小琴童仔仔成长记
2021-07-26 01:40
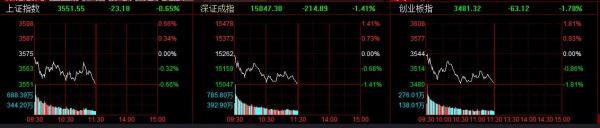
A股三大指数集体下挫两市逾3300个股下跌
2021-07-23 13:10

妙可蓝多倾力打造“中国酪印”
2021-07-21 09:41
深化全面合作加快老区振兴
2021-07-20 12:35